
The
Polaroid sensor we used is an ultrasonic ranging unit. It sends out
ultrasonic pulses in order to provide a measurement in inches representing
the distance to the nearest object in its path. The distance is displayed
on a three digit readout that is updated with each pulse.
Polaroid Sensor
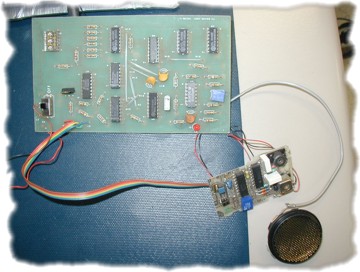
Polaroid Sensor Circuit Diagram
- BCD to Binary Conversion
In the Input Conditioning section, more details are given regarding the
circuitry necessary to connect this sensor with our circuit.
For more information regarding the Polaroid sensor visit
http://www.robotprojects.com/sonar/scm.htm |